联系我们
- 上海耐创测试技术有限公司
- 联系人:陈工
- 电话:021-39197548
- 邮箱:zhujing@forcechina.com
- 地址:上海市嘉定区马陆镇宝安公路2999弄东方慧谷50号2层

六维力传感器仿生实验应用
文章出处:NaiChuang人气:发表时间:2023-09-27 10:53:19
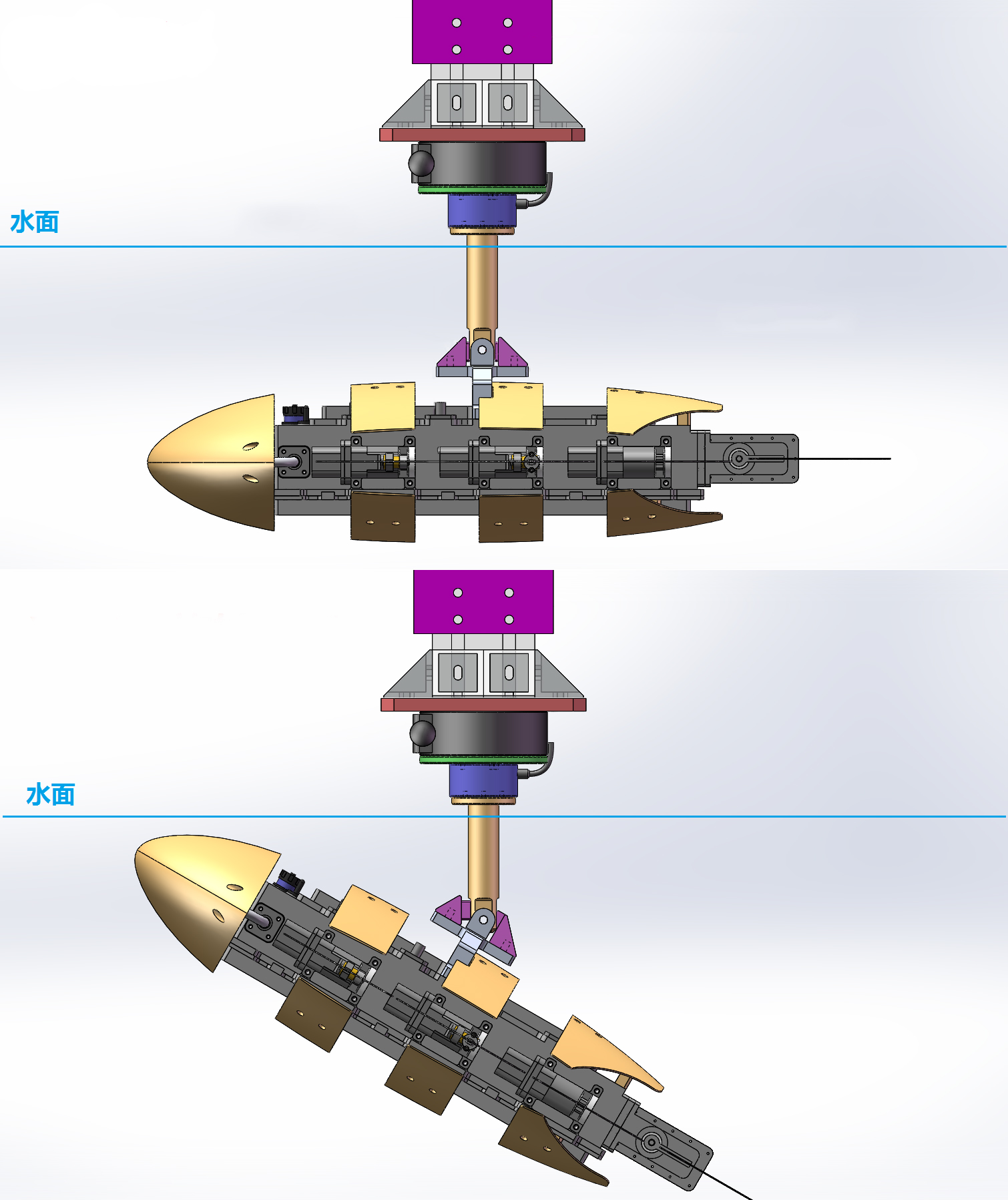
魔鬼鱼,又称蝠鲼,具有独特而灵活的水下运动模式,即使是在波涛汹涌的海水中,它仍能优雅地摆动鱼鳍,畅游无阻。鳍,是指鱼类和某些其他水生动物的类似翅或桨的附肢,起着推进、平衡及导向的作用。按其所在部位,可分为背鳍、臀鳍、尾鳍、胸鳍和腹鳍。相当于陆生动物的前肢,着生于鳃盖后缘的胸部。对鱼类具有运动、平衡和掌握运动方向的机能。蝠鲼的鱼鳍生长于胸腔两侧,可以为蝠鲼提供良好的驱动力以及平衡力。除此之外,蝠鲼整体呈流线型的躯干,可以很好地降低它在水中行动时受到的阻力,数年来科学家们一直在为模拟魔鬼鱼运动形态而刻苦攻关。

上海市某高校实验室购买了我司的六维力传感器进行该仿生学实验,该实验主要测试蝠鲼模型在水下运动时推进力产生大小及不同背面弧度参数对所受阻力的影响。
设计模型由伺服电机驱动蝠鲼模型来模拟蝠鲼向前游动,由此过程会产生三个方向的应力以及三个方向的转矩Fx,Fy,Fz,Mx,My,Mz。
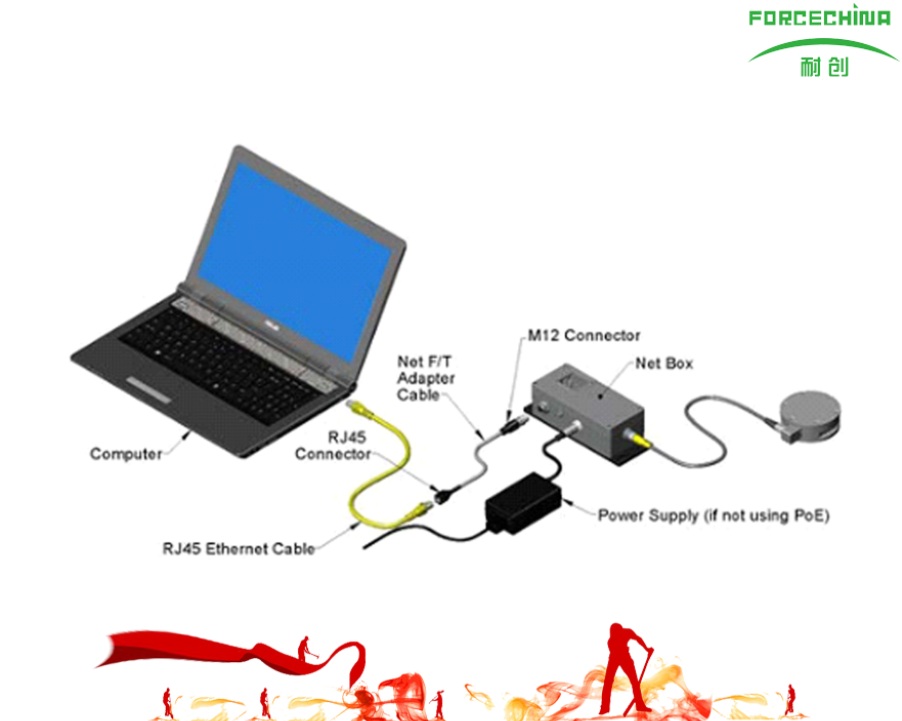
传感器作为上固支端连接节点,通过连接杆固支水下蝠鲼运动模型;实验选用六维力力传感器NC-6DT130,同时测量三个轴向的力Fx,Fy,Fz和三个轴向的力矩Mx,My,Mz。
六维力传感器广泛应用于风洞模型集成;医疗技术的手柄,医疗/假肢/矫形技术和工具的集成;生物力学测量,运动医学/步态分析,人机工程测量;在细观装配和处理过程的控制,机械维护及错误检测中力或转矩控制操作;碰撞检测等方面。












 沪公网安备 31011402003414号
沪公网安备 31011402003414号