联系我们
- 上海耐创测试技术有限公司
- 联系人:陈工
- 电话:021-39197548
- 邮箱:zhujing@forcechina.com
- 地址:上海市嘉定区马陆镇宝安公路2999弄东方慧谷50号2层

六维力传感器与UR机器人抛光工序测试
文章出处:未知人气:发表时间:2023-09-27 10:53:26
随着社会文明与科学技术的不断进步,许多的企业开始采用工业机器人代替来进行机械化流水线作业或者一些对人体伤害较高的职业,例如,焊接工、喷漆工等。随着机器人技术愈加完善,市面上随之出现了另一个机器人工种:协作机器人,协作机器人比起工业机器人具有更加小巧轻便的身躯以及简洁方便的编程操作系统。
其中以UR协作机器人为代表,其编程简单,只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏平板电脑上的下箭头键即可只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏平板电脑上的下箭头键即可;且安装快捷,对于未经训练的操作员而言,从开箱到取出协作式机器人、安装机器人、到首次简单作业编程,通常不到一个小时便能完成。
随着协作机器人的普及,与协作机器人相配套的力传感器也随之出世,将六维力传感器与UR机器人配合使用,可以做到近乎完美的加工工艺。

广东省东莞市某机械公司购买了我司的BOTA-Rokubi六维力传感器用于UR机器人的抛光加工实验,我司的BOTA六维力传感器具有以下几个特点:可忽略的温度漂移、高鲁棒性、噪声低于0.01%F.S.、高达1000HZ的响应频率、增强机器人的触觉、精密接触力检测、轨迹示教应用,高公差装配、即插即用。同时,它还有串口通讯与EtherCAT两种通讯选项,安装时可以直接通过法兰进行装配,无需多余配件。
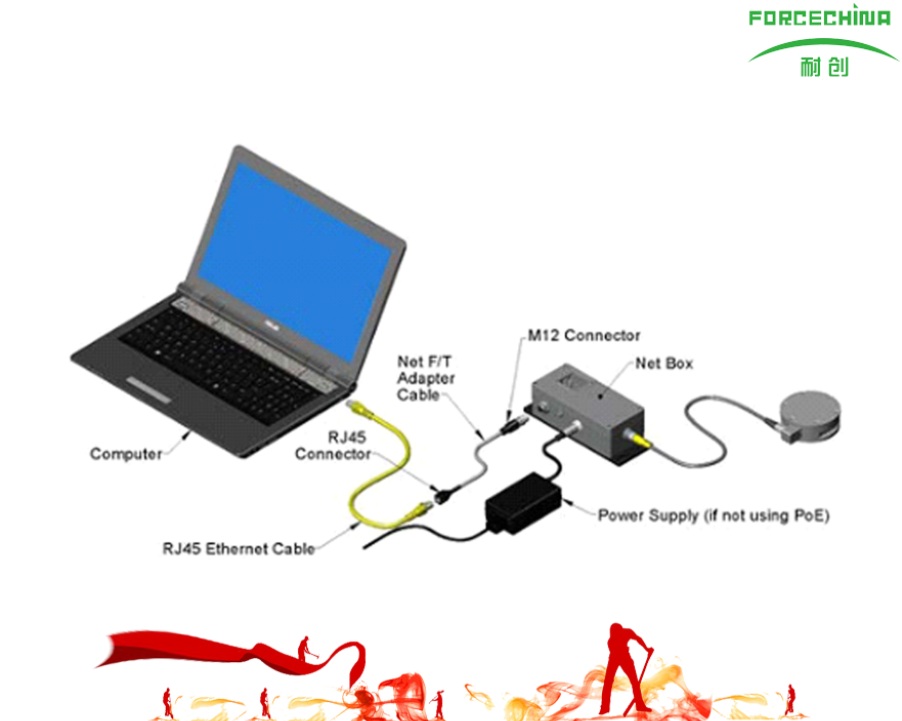
BOTA六维力还可与我司的软件配套,将数据输出至电脑上,可以更加直观地观察力值与扭矩的变化,还可以通过软件将数据导出,方便后期的数据分析。

欢迎感兴趣者来我司咨询
其中以UR协作机器人为代表,其编程简单,只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏平板电脑上的下箭头键即可只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏平板电脑上的下箭头键即可;且安装快捷,对于未经训练的操作员而言,从开箱到取出协作式机器人、安装机器人、到首次简单作业编程,通常不到一个小时便能完成。
随着协作机器人的普及,与协作机器人相配套的力传感器也随之出世,将六维力传感器与UR机器人配合使用,可以做到近乎完美的加工工艺。
广东省东莞市某机械公司购买了我司的BOTA-Rokubi六维力传感器用于UR机器人的抛光加工实验,我司的BOTA六维力传感器具有以下几个特点:可忽略的温度漂移、高鲁棒性、噪声低于0.01%F.S.、高达1000HZ的响应频率、增强机器人的触觉、精密接触力检测、轨迹示教应用,高公差装配、即插即用。同时,它还有串口通讯与EtherCAT两种通讯选项,安装时可以直接通过法兰进行装配,无需多余配件。
BOTA六维力还可与我司的软件配套,将数据输出至电脑上,可以更加直观地观察力值与扭矩的变化,还可以通过软件将数据导出,方便后期的数据分析。
欢迎感兴趣者来我司咨询











 沪公网安备 31011402003414号
沪公网安备 31011402003414号